

On parle de méthode analytique lorsqu'on résoud un exercice en effectuant des projections des vecteurs forces sur les axes, et donc en utilisant la trigonométrie.
En quoi ça consiste?
On nous présente un scénario, où un solide est soumis à plusieurs forces. En général l'exercice a pour but de trouver la valeur d'une ou 2 de ces forces, connaissant certains paramètres, comme la masse du solide, l'angle du support.
La solide est immobile ou en mouvement rectiligne uniforme, ce qui permet d'utiliser la 1ère loi de Newton : Dans une référentiel Galiléen, si un solide est immobile ou en mouvement rectiligne uniforme, alors la somme des forces extérieures est nulle.
Nomenclature : P représente la force poids, c'est à dire le vecteur. P représente la norme de P, c'est à dire la valeur de la force en Newton.
La méthode de résolution:
On commence par faire une schéma, avec les forces dont il est question dans l'exercice. Attention, le sujet ne mentionne pas toujours le poids, mais vous devez le prendre en compte.
Les forces que l'on trouve en général:
- le poids P, qui part du centre d'inertie et se dirige vers le bas verticalement,
- la résistance du support R, qui part du milieu de la surface de contact , perpendiclairement au support, vers le haut,
- la tension d'un fil, d'une tige, T, qui part du point de contact et se dirige en tournant le dos au solide,
- les frottements f s'ils sont mentionnés, qui partenyt du centre de la surface de contact avec le support, parallèles au support et dirigés à l'opposé du mouvement,
- Il se peut que le sujet mentionne une autre force F, souvent la force de rappel d'un ressort, mais dans ce cas elle est décrite de façon détaillée.

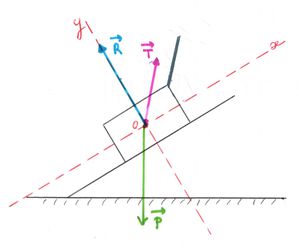
Exo type : un solide immobile posé sur un plan incliné retenu par une barre
On applique la 1ere loi de Newton, c'est à dire que l'on écrit que la somme vectorielle des forces est nulle.
Par exemple : P + R + T = 0
Mais juste avec les vecteurs, on ne peut rien faire pour trouver la valeur des forces manquantes.
Il faut passer par les coordonnées des vecteurs. On va chercher la valeur de l'abscisse et de l'ordonnée de R et de T, ce qui permettra de retrouver R et T.
Pour cela, il faut redessiner votre schéma, en plaçant l'origine de tous les vecteurs au centre d'inertie. Puis on dessine un repère (O, i, j), avec par exemple ici O au centre d'inertie, (Ox) parallèle au support et (Oy) perpendiculaire au support.
 On redessine les
vecteurs partants du centre de gravité, et on définit le repère
On redessine les
vecteurs partants du centre de gravité, et on définit le repère
Toujours sur le schéma, on projette les vecteurs forces sur les axes.
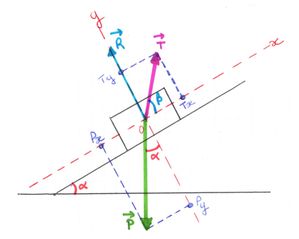
On projette les vecteurs sur les axes
Puis on écrit la 1ère loi de Newton projetée sur les axes ( je rappelle que ce qui se passe sur des vecteurs se passe aussi sur les coordonnées des vecteurs. Donc ici, la somme des abscisses est nulle et la somme des ordonnées est nulle).
On écrit alors:
- Px + Rx + Tx = 0
- Py + Ry + Ty = 0
Maintenant il faut trouver les valeurs des coordonnées des vecteurs, ou du moins les exprimer de manière littérale.
On rappelle que P = mg, donc P = mg, ce qui permet de connaître la valeur de P puisqu'on connait m et g.
Il faut ensuite exprimer Px et Py, en fonction de l'angle qu'ils forment avec P.
Le schéma permet d'expliquer la méthode: l'angle entre le support et le sol se retrouve au niveau de P.

Si je place tout au même point, je vois que l'angle entre le sol et le plan se retrouve entre P et l'axe(Oy)
Connaissant P et l'angle, je peux donc exprimer Px et Py grâce à la trigonométrie dans les triangles rectangles.

Attention, la trigo dans les triangles rectangles donne la valeur positive des coordonnées Px et Py, mais il faut faire attention aux signes : ici, Px et Py sont du côté négatif de chaque axe du repère, donc Px et Py doivent être exprimés dans la 1ère loi de Newton de façon à être des valeurs négatives.
- Px = - P sin α
- Py = - P cos α
Il faut ensuite exprimer Rx et Ry, plus facile, puisque R est parallèle à l'axe des ordonnées. Donc Rx = 0 et Ry = R
Pour T, on procède comme pour P. On connait l'angle entre T et (Oy), ce qui permet d'exprimer Tx et Ty en fonction de T, et de l'angle β. Comme précédemment faire attention aux signes: cette fois-ci le vecteur est orienté vers les x positifs et les y positifs.
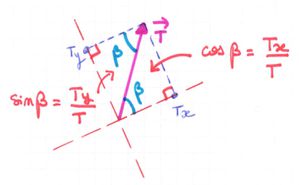
- Tx = T cos β
- Ty = T sin β
Le système projeté sur les axes devient donc, par exemple :
- - mg cosα + T cos β = 0
- -mg sinα + R + T sinβ = 0
d'où:
- T = mg cosα / cosβ
- R = mg sinα - T sinβ
En remplaçant les lettres par leurs valeurs numériques, on peut donc calculer T et R.
L'art de bien choisir son repère:
Vous vous demandez " mais comment sait-on qu'il faut positionner le repère comme ceci ou comme cela?"
C'est une question d'habitude, et de logique. On va au plus facile. Dans l'exemple précédent, il est judicieux de choisir un repère tel qu'une des forces soit sur un des axes, cela permet de ne pas avoir de travail de trigo à effectuer pour une force sur 3.
Dans l'exemple suivant, c'est la même chose ! En positionnant le repère comme indiqué, on a 2 forces sur 3 ( f et R) qui sont le long des axes et donc qui n'ont pas besoin d'être projetées.
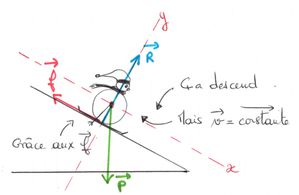
admirez le style...
Dans l'exemple ci-dessous, une boule est retenue par 2 fils tendus de même longueur accrochés à 2 murs. Le repère le plus judicieux est indiqué : P se situe le long de (0y), et
on positionnera l'origine de T1 et T2 au centre d'inertie. Les 2 forces de même valeur T sont alors symétriques. 
Bon courage!
Si vous avez des questions : un com', un mail, tout est possible !


